Project
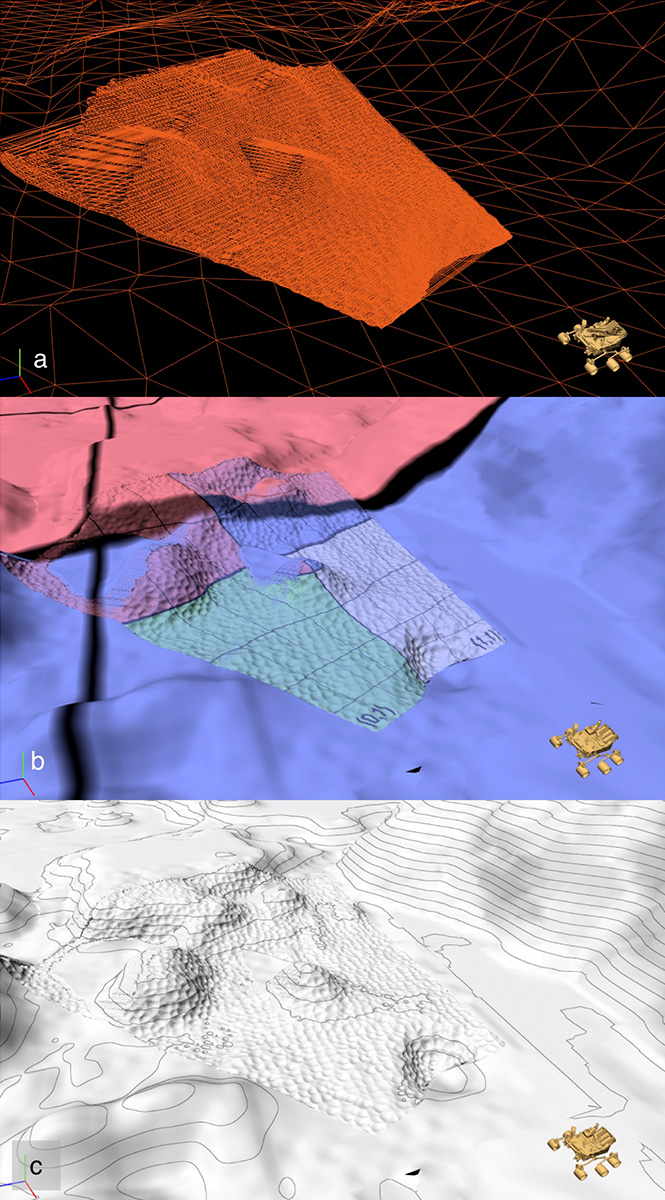
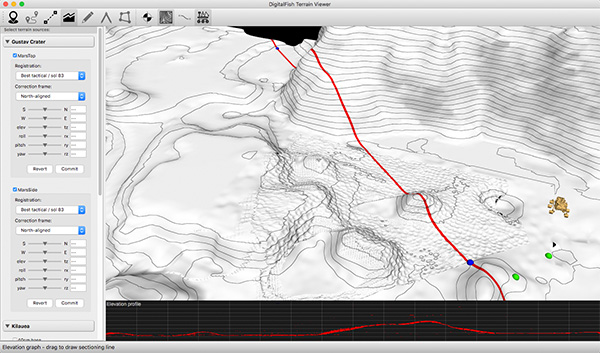
DigitalFish and Carnegie Mellon University are collaborating to apply volumetric processing and subdivision surfaces in representing the Martian terrain for planetary-rover mission and science planners. Low-resolution data from orbital assets and very high-resolution surface scans are fused in near-real-time to produce high-quality, multi-textured terrain maps that seamlessly span vastly varying levels of detail.
Why DigitalFish
This project falls outside our typical storytelling-technology focus, but it draws directly on our animation technology expertise with advanced surface representations, geometry and image processing, spatial algorithms and GPU compute. The project applies multiple open-source technologies from the animation industry, including Pixar’s OpenSubdiv, DreamWorks’s OpenVDB, ILM’s OpenEXR, and Disney’s Ptex.
Client
NASA
DigitalFish Contributors
Dan Herman
Doug Epps
Nathan Litke
Adam Wagner
Josh Qualtieri